Bachelor of Mechanical Engineering Course Work, PSB, Singapore Control of Drone using Root Locus Tool Considers a quadcopter whose height about the ground is measured using an altimeter
| University | PSB Academy (PSB) |
Question 1
Control of Drone using Root Locus Tool Considers a quadcopter whose height about the ground is measured using an altimeter. When hovering the motors are maintained at a constant rate, such that thrust force balances the gravity acting on the quadcopter.
Take F(t) to be the amount of additional thrust, and need to make changes in height. The quadcopter weighs 750 grams and has air resistance proportional to 0.3 of its velocity. For each of the four motors, the transfer function between voltage/thrust is given by 0.4. Use the information given to write down the differential equation for the quadcopter, for movement in the vertical direction, and hence the transfer function for f(t)and h(t).
• Plot the unit step response of the quadcopter, for the first 15 seconds.
The quadcopter is fitted with an altimeter that measures the height of the ground.
1. Sketch a diagram of the closed-looped system for the speed control in order to maintain height at a set point, and write down the closed-loop transfer function.
2. Plot the system response.
3. Find the feedback gain that results in a step response that is less than 2% overshoot, and note down the rise time. Provide a plot and state the gain. a. Design a simple controller such that the step response of 2% overshoot is obtained. Note down the rise time, pole positions, and the feedback gain.
Question 2
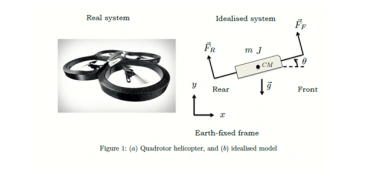
The quadrotor helicopter shown in Figure la is an example of a real system. The idealized model of the system is shown in Figure lb. As your first task, you are required to obtain:
(a) State-space model for the idealized system
(b) Build a Simulink model for the quadrotor helicopter using state-space equations and
(c) Simulate the built model and record the output. Hint: the system has 3 degrees of freedom, so to model the system, we need 6 state variables.
Buy Custom Answer of This Assessment & Raise Your Grades
Maximize your academic success with our comprehensive services, including top-notch Online Exam Help and reliable assignment writing service. At PSB Academy (PSB) in Singapore, we understand the complexities of the Bachelor of Mechanical Engineering program, and our team of experts is here to provide invaluable support. Whether you need assistance in controlling a drone using the Root Locus Tool or require guidance in completing your course work, our professionals will deliver exceptional results. Pay our experts to take help on your Bachelor of Mechanical Engineering assignments at PSB and ensure your success in mastering the control systems of drones and excelling in your mechanical engineering studies
- Final Assignment: Migrating FashionOnline’s Infrastructure to AWS: A Strategy for Enhanced Availability and Data Protection
- HRM331: Talent Management – Strategic Shift from the War for Talent to the Wealth of Talent
- Marginalised Populations – The Structural and Cultural Exclusion of People Experiencing Homelessness in Singapore
- CVEN3501 Assignment 2: Groundwater Modelling of Drawdown from a Pumping Bore
- CSCI312 Assignment 2: Conceptual Modelling and Implementation of a Data Warehouse and Hive Queries
- CH2123 Assignment: Fugacity, VLE Modeling & Applications of Henry’s Law
- BAFI1045 Assignment -Constructing and Evaluating Passive and Active Portfolios Based on the Straits Times Index (STI)
- FIN2210E/FIN2212E Group Assignment: Financial Risk Management Analysis of Bursa Malaysia Companies
- FLM101 Assignment: A Film Analysis: Stylistic Techniques and Their Thematic Importance
- HRM Assignment Answer: Talent Transformation in the Age of AI: Turning Challenges into Opportunities via Ecosystem Innovation
UP TO 15 % DISCOUNT